用于 Linux 的 S.Bus 驱动
S.Bus Driver for Linux 允许基于 Linux 的无人机通过串行端口从 Futaba S.Bus 接收机 访问多达 16 个通道。 驱动程序还应该与使用 S.Bus 协议的其他接收器一起工作,包括作为 FrSky,RadioLink,甚至是 S.Bus 编码器。
需要信号反相器电路(如下所述)以使器件串行端口能够从接收器读取数据。
当通过板载串行端口或通过 USB 转 TTL 串行电缆连接到接收器时,驱动程序已经在运行 Raspbian Linux的Raspberry Pi 上进行了测试。 它可以在所有 Linux 版本和所有串行端口上运行。
信号逆变器电路
S.Bus 是 inverted UART 通信信号。 由于许多串行端口/飞行控制器无法读取反向 UART 信号,因此接收器和串行端口之间需要信号反相器电路来反转信号。 本节介绍如何创建适当的电路。
Raspberry Pi 需要此电路才能通过串行端口或 USB-to-TTY 串行转换器读取 S.Bus 远程控制信号。 许多其他飞行控制器也需要它。
所需组件
- 1x NPN 晶体管(例如 NPN S9014 TO92)
- 1x 10K 电阻
- 1x 1K 电阻
可以使用任何类型/型号的晶体管,因为电流消耗非常低。
Raspberry Pi 只有一个串口。 如果已经使用,您可以通过 USB 转 TTY 串行电缆(例如 PL2302 USB 转 TTL 串行转换器)将 S.Bus 接收器连接到 RaPi USB 端口。
电路图/连接
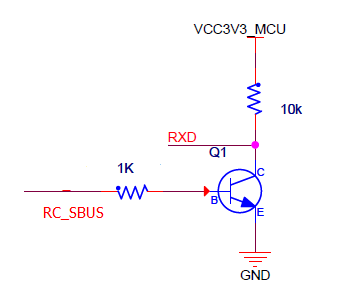
按如下所述连接组件(并在电路图中显示):
- S.Bus 信号→1K 电阻→NPN 晶体管
- NPN晶体管发射→GND
- 3.3VCC&→ 10K电阻→ NPN晶体管集合→ USB-to-TTY rxd
- 5.0VCC→S.Bus VCC
- GND → S.Bus GND
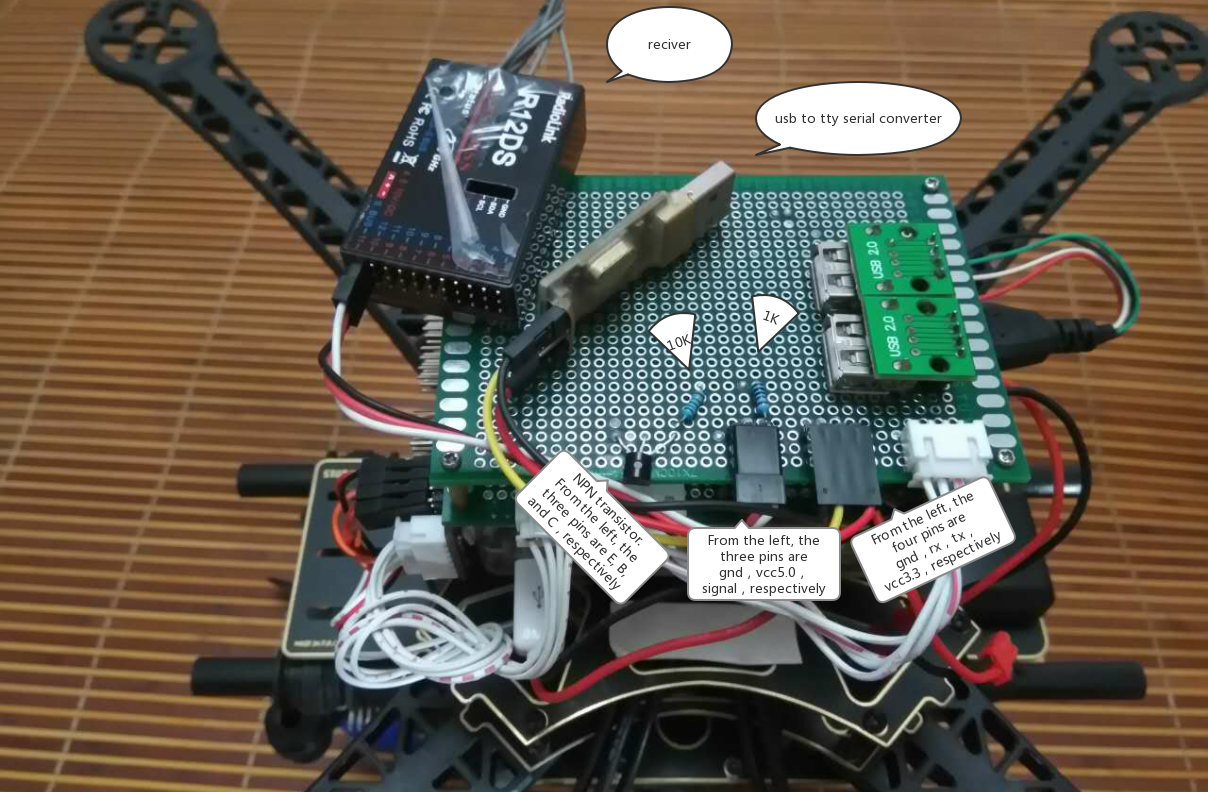
电路板图像
下图显示了电路板上的连接。
源代码
用法
命令语法是:
linux_sbus start|stop|status -d <device> -c <channel>
因此,例如,要在设备 /dev/ttyUSB0 上自动启动侦听 8 个通道的驱动程序,您可以将以下行添加到启动配置文件中。
linux_sbus start -d /dev/ttyUSB0 -c 8
原始配置文件位于 Firmware / posix-configs 中。 根据官方文档,在完成
make upload相关操作后,所有与 posix 相关的配置文件将被放置在 /home/pi 中。 您可以修改要在那里使用的文件。